Motorized Translation Stages of 8MTL series are based on 3 phase ironless linear brushless servo motor technology. Direct drive technology allows users to reach zero backlash motion with high accuracy, repeatability and low friction.
Linear non-contact optical encoder as a feedback system guarantees direct control of position with sub-nanometer resolution of motion.
Naturally aged aluminum alloy guaranties high temperature stability, softness of 8MTL instruments and excellent long period kinematics without drift of guide system. Small footprint of the stage allows to integrate it into very high density machines and tight space applications.
8MTL series translation stages can be prepared for clean room and vacuum (up to 10-3 Torr) applications by request. For higher vacuum please contact Standa support. Special requirements for cleanliness should be requested additionally (Please, indicate that in products request).
Motorized translation stage can be easily connected to standard imperial/metric optical table directly. XY scanning stages can be directly assembled without using any connecting plates. Extreme orthogonality requirements could be additionally requested from Standa support.
Motion control of 8MTL series translation stages is available with Standa or ACS motion Controllers & Drivers.
For light industry applications 8MTL stages can be supplied mounted on standard optical table or extremely flat granite plate.
Specifications
Kinematics & Feedback information
Travel range
300 mm
Encoder Type
Optical Encoder
Encoder Model
LEn1
Encoder Resolution
any of the range: 25 nm to 5 µm (on demand)
Encoder Interface
Differential RS422
Internal Multiplier
YES
1) Multiplication Factor
4-200 (on demand)
Encoder Grating Period
20 µm
Reference Mark (Index)
YES
2) Absolute Accuracy
before calibration
±5.00 µm
after calibration
±1 µm
Uni-Directional Repeatability
N/A
2) Bi-Directional Repeatability (peak to peak)
±0.15 µm or better
2) Bi-Directional Repeatability (RMS)
±0.08 µm
3) Pitch, µrad / arcsec
±30 / ±6.20
3) Yaw, µrad / arcsec
±30 / ±6.20
Roll
N/A
4) Maximum Velocity (load 4kg)
<2000 mm/s
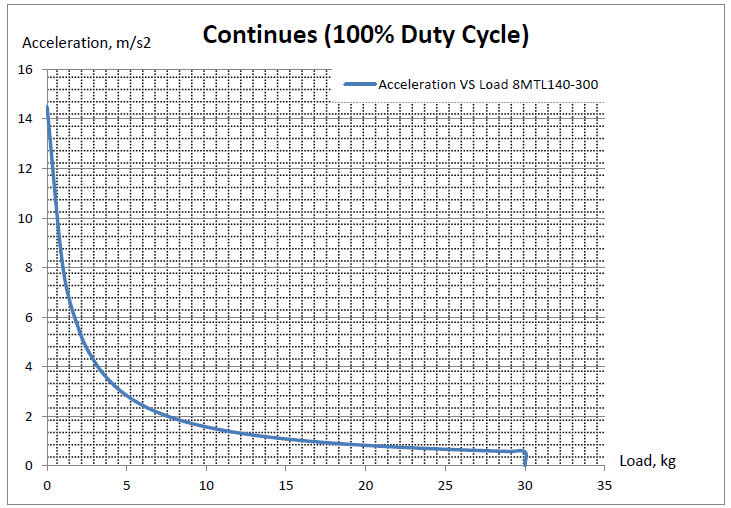
5) Maximum Acceleration (load 4kg)
<20000 mm/s2
Limits Switches Type (Safety)
Optical (Optrons)
Limit Switch Polarity (Safety)
Pushed is closed
Limit Switch Voltage
5…24 V
Load, Guiding & Transmission Information
Design Type
Linear Motor Stage
Linear Motor Model
LM3
Linear Motor Design Type
Ironless BLDC motor
Maximum Bus Voltage
>300 VDC
6) Load Capacity (Centrally Placed)
30 kg
7) Moving Mass
1.2 kg
Guiding System
Recirculating linear rails and carriages units
Material And Environment Conditions
Housing Material
Aluminum Alloy
Housing Coating (Finish)
Black Anodizing
Environment pressure
Normal Atmosphere
Operating Temperature
20±2, °C
Control, Communication and Cabling
8) Recommended controllers
ACS Products Line or 8SMC5-USB series
8) Recommended drivers
ACS Product Line or 8SMC5-USB series
9) Recommended power supply
2 phase / 3 phase source
12) Recommended communication interface
EtherCAT / RS232 / USB / TCP-IP
Cable Length
2 m (other by request)
10) Differential Outputs
Optionally available by request
Accessories Information
Base Plate for Mechanical Interface
Not required
XY Stack
Directly
Z Configuration
Not available (choose from other Standa stages series)
Additional Details
Dimensions of Moving Platform
140 x 140 mm (W x L)
Stage Dimensions
185 x 513 x 55 mm (W x L x H)
Measurement System
Metric/Imperial
11) Orthogonality, µrad / arcsec
24 / 5
13) Protection Level
Basic
RoHS
Compliant
Weight
6.75 kg
Product added to the Wishlist
Ordering Information
Model
Description
8MTL1401-300-LEn1-025
Encoder resolution: 25 nm
8MTL1401-300-LEn1-050
Encoder resolution: 50 nm
8MTL1401-300-LEn1-100
Encoder resolution: 100 nm
8MTL1401-300-LEn1-200
Encoder resolution: 200 nm
8MTL1401-300-LEn1
Sin/Cos analog interface
1) With x4 evaluation; system can be delivered with standard analog SIN/COS encoder interface for personal interpolation.
2) Absolute Accuracy & Bi-Directional Repeatability measurements are processed with Zygo ZMI 501 Michelson laser interferometer.
3) Pitch & Yaw measurements are processed with 11D-ALI-COL electronic autocollimator. Resolution of 11D-ALI-COL: 1 µrad. Environment error: 1 µrad.
4) Maximum Velocity is electrically limited by encoder and driver CUT-OF frequency; maximum velocity is also limited by guiding system.
5) Maximum Acceleration is limited by Drivers` Peak Current, Motors` Peak Current and External Load (inertia). Please contact Standa for support.
6) Load Capacity is limited by position of load and integrated guiding system. Please contact Standa support for loading calculation.
7) Moving Mass is constant parameter of system which characterize m0 or inertia of unloaded system.
8) Recommended controllers & Recommended drivers can be optimized for a certain application. Please contact Standa support for recommendation.
9) Recommended power supply depends on required duty cycle and load. Please contact Standa support for recommendation.
10) Differential Outputs are available in passive (buffered) or active (modulated) way with LCMv2.
11) Stages can be assembled with better orthogonality by request.
12) Scalar Control can be implemented with USB/ TCP-IP / RS-232 communication iterface; for vector control we recommend to use EtherCAT.
13) Protection of guiding system is limited and not supposed to be used in wet and dusty environment.